Miniscope
This module provides support for recording data with UCLA Miniscope devices. (This sometimes also includes industrial cameras for which no specialized drivers exist).
Usage
Configure as usual. Please ensure that when recording data, the raw frames are recorded and the displayed frames are displayed in a Canvas, and not the other way round! Otherwise the recorded data may be incomplete.
Ports
| Name | Direction | Data Type | Description |
|---|---|---|---|
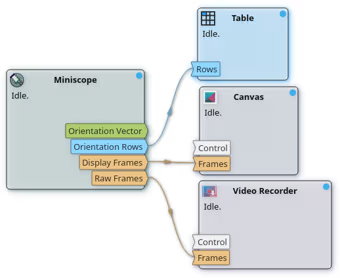
| Orientation Vector🠺 | Out | FloatSignalBlock | Returns the orientation sensor quaternions (qw, qx, qy, qz) as vector. |
| Orientation Rows🠺 | Out | TableRow | Returns the orientation sensor quaternions (qw, qx, qy, qz) as table rows. Includes acquisition timestamps as well. |
| Display Frames🠺 | Out | Frame | Frames for display. Includes indicators and online background subtraction, as well as other user changes. |
| Raw Frames🠺 | Out | Frame | Raw frames as recorded by the Miniscope. |
Stream Metadata
| Name | Metadata |
|---|---|
| Orientation Vector🠺 | time_unit: String, Unit of the timestamps. Always set to "milliseconds". data_unit: String, Unit of the signal block values. Set to "au". signal_names: List<String>, List of the quaterion names: "qw", "qx", "qy", "qz" |
| Orientation Rows🠺 | table_header: String List, Table header |
| Display Frames🠺 | framerate: Double, frame rate in FPS. |
| Raw Frames🠺 | framerate: Double, frame rate in FPS. |